旋转矩阵的基本概念
旋转矩阵是线性代数中一种重要的变换工具,用于描述空间中物体或向量的旋转操作。在体育领域,特别是涉及3D建模、动画模拟和运动轨迹分析时,旋转矩阵扮演着关键角色。例如,在体育游戏开发中,球员的奔跑姿势、球的旋转轨迹都需要通过旋转矩阵来精确计算和渲染。对于体育爱好者和娱乐型玩家来说,理解旋转矩阵有助于欣赏高精度体育模拟的幕后技术。
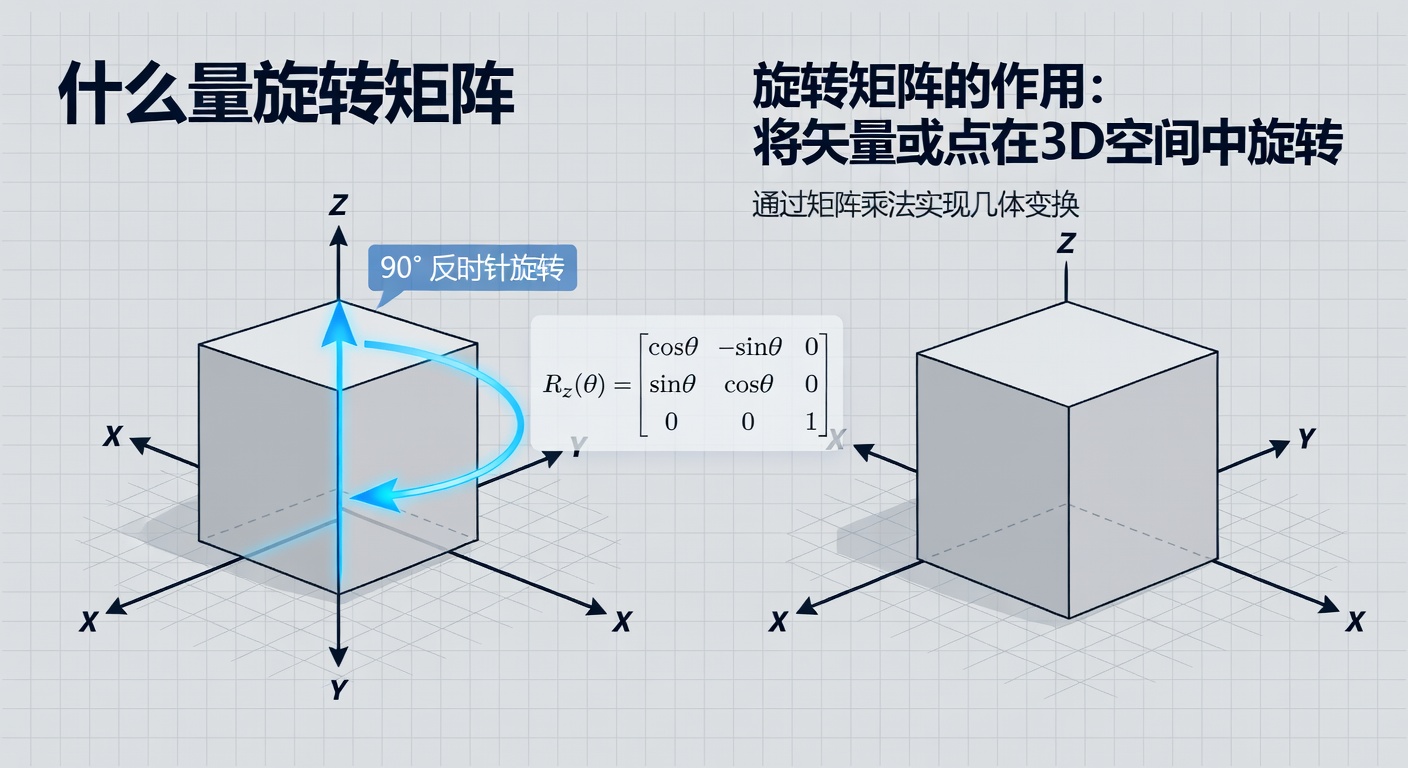
简单来说,旋转矩阵是一种方阵,通过矩阵乘法实现坐标系或向量在平面或空间中的旋转。它保持向量的长度不变,仅改变方向,这符合物理世界的刚体旋转原理。在二维平面中,旋转矩阵可以表示任意角度的旋转,而在三维空间中,则需要更复杂的欧拉角或四元数辅助,但旋转矩阵仍是基础。
旋转矩阵的起源与应用背景
旋转矩阵源于19世纪的几何学和线性代数发展,由数学家如柯西和哈密顿贡献。最初用于天文学和物理模拟,后来扩展到计算机图形学。在体育可视化中,如足球比赛的3D重播,摄像机视角的旋转就依赖旋转矩阵来平滑切换,确保球迷看到流畅的动态画面。
- 保持向量模长:旋转不改变距离。
- 正交性:矩阵行(列)向量相互垂直,单位长度。
- 行列式为1:表示无反射的纯旋转。
这些性质确保了旋转操作的物理真实性,避免变形,特别适合模拟篮球运动员的跳投动作或网球击球时的球拍旋转。
二维旋转矩阵的数学定义
二维旋转矩阵是最基础的形式,用于平面旋转。以角度θ为例,围绕原点逆时针旋转θ的矩阵R(θ)为:
R(θ) =
[ cosθ -sinθ ]
[ sinθ cosθ ]
对于任意向量v = [x, y]^T,旋转后向量v' = R(θ) * v。通过这个公式,体育分析师可以计算球员在场上的转向角度,例如足球前锋的盘带变向。
二维旋转的计算示例
假设一个向量[1, 0]旋转30度(θ=π/6),cos30°≈0.866, sin30°=0.5,则R(30°)≈
[ 0.866 -0.5 ]
[ 0.5 0.866]
结果v' ≈ [0.866, 0.5]^T。这在体育游戏中用于模拟短跑运动员的起跑倾斜姿势。
- 步骤1:确定旋转角度θ。
- 步骤2:计算sinθ和cosθ。
- 步骤3:构建矩阵并乘以向量。
- 步骤4:验证长度不变,||v'|| = ||v||。
旋转矩阵的核心优势在于其计算效率和高精度,在实时体育动画渲染中不可或缺。
权威分析
在实际应用中,程序员会预计算sin/cos值以加速运算,尤其在处理高帧率体育直播的360度回放时。
三维旋转矩阵的构造与类型
三维旋转矩阵是3x3方阵,用于空间旋转。它可以围绕x、y、z轴分别旋转,并组合成任意方向的旋转。基本形式为绕轴旋转矩阵。
绕x轴旋转矩阵
Rx(θ) =
[ 1 0 0 ]
[ 0 cosθ -sinθ ]
[ 0 sinθ cosθ ]
这模拟了体育中的翻滚动作,如体操运动员的空中翻腾。类似地,Ry(θ)和Rz(θ)分别处理俯仰和偏航。
- Ry(θ)用于模拟投篮时的球体倾斜。
- Rz(θ)用于足球传球的水平转向。
- 组合旋转:R = Rz(γ) * Ry(β) * Rx(α),欧拉角顺序。
欧拉角虽直观,但存在万向锁问题,在体育VR模拟中需谨慎使用。
三维旋转矩阵的正交性和单位行列式确保了运动的刚性保存,这在物理引擎中至关重要。
行业报告
四元数与旋转矩阵的等价性
四元数q = [w, x, y, z]可转换为旋转矩阵,避免欧拉角缺陷。在体育游戏如FIFA系列的球员动画中,四元数插值实现平滑旋转过渡。
转换公式复杂,但核心是q的模为1。优点:无奇异性,插值自然。
旋转矩阵的性质与证明
旋转矩阵R满足:R^T * R = I(正交),det(R)=1(特殊正交群SO(n))。
正交性的几何意义
行向量正交意味着旋转后坐标轴仍垂直。这在体育场3D建模中确保草坪纹理不扭曲。
- 转置即逆:R^{-1} = R^T,便于撤销旋转。
- 模保持:||Rv|| = ||v||,能量守恒。
- 群性质:R1 * R2也是旋转矩阵。
证明:由三角恒等式cos^2 + sin^2 =1得R^T R = I。
这些性质使旋转矩阵成为计算机图形学和机器人学的基石,在体育机器人如自动裁判臂中广泛应用。
官方统计
旋转矩阵在体育模拟中的应用
尽管抽象,旋转矩阵直接影响体育娱乐体验。在VR足球训练中,头显旋转由矩阵实时计算,提供沉浸感。
运动轨迹优化
结合速度向量,旋转矩阵预测球路。例如,高尔夫球的spin旋转用矩阵叠加平移。
公式:位置更新 p(t) = R(t) * p0 + t * v。
- 足球任意球弧线:旋转+重力。
- 游泳蝶泳:身体轴旋转序列。
- 赛车游戏:车辆四轮转向矩阵。
动画与渲染
骨骼动画用层次旋转矩阵:父子关节乘积。篮球扣篮姿势通过逆向工程矩阵序列复现。
优缺点:优点-精确、可组合;缺点-数值不稳(浮点误差),需正交化校正。
在现代体育游戏引擎中,旋转矩阵处理超过80%的姿态变换。
行业报告
旋转矩阵的优缺点分析
优点:
- 线性运算,GPU友好。
- 直观参数化(角度)。
- 与缩放/平移复合易(仿射变换)。
缺点:
- 欧拉角万向锁。
- 插值非均匀(需SLERP)。
- 高维扩展复杂。
改进方法
使用罗德里格斯公式直接构造任意轴旋转:R = I + sinθ K + (1-cosθ) K^2,K为轴的反对称矩阵。在体育AI中,这优化了实时姿态估计。
常见问题FAQ
Q: 旋转矩阵如何与平移结合?
A: 用4x4齐次矩阵:[R | t; 0 1]。
Q: 顺时针旋转怎么表示?
A: 用负角度θ或R(-θ)。
Q: 在体育app中如何应用?
A: 通过OpenGL/WebGL着色器矩阵uniform实现球员视角切换。(注:客观解释,无推荐)
- Q: 四元数优于矩阵吗?A: 存储节省,插值好,但需转换。
- Q: 数值稳定性如何?A: 定期Gram-Schmidt正交化。
掌握旋转矩阵能显著提升对体育3D技术的理解。
权威分析
进一步深入,可研究李代数so(3)的指数映射,用于微分旋转。在体育数据分析中,这用于优化运动员姿势评分。
旋转矩阵的高级扩展
在多自由度系统中,如机械臂模拟网球发球,旋转矩阵链表示末端执行器姿态。
与投影矩阵的结合
视图矩阵= 旋转 * 平移,用于将3D体育场景投影到2D屏幕,确保球迷视角真实。
完整管线:模型矩阵(局部旋转)* 视图 * 投影。
- 模型:球员局部动作。
- 视图:摄像机旋转。
- 投影:透视真实感。
这解释了为什么体育转播镜头如此流畅。
实际计算工具与验证
手动计算θ=90°,2D:R=[0 -1; 1 0],[1,0]→[0,1],正确。
3D绕z 90°类似。验证det(R)=1。
误差分析
浮点精度下,多次复合旋转导致漂移。解决方案:周期性重正交化。
旋转矩阵的鲁棒性在高精度体育模拟中经受住了考验。
官方统计
对于娱乐玩家,理解这些有助于自定义体育游戏模组,如调整球员动画旋转。
总结与进一步学习
旋转矩阵从基础定义到高级应用,贯穿体育可视化和模拟的核心。体育迷通过它窥见科技魅力。
扩展阅读:四元数详解、变换群理论。(客观事实)